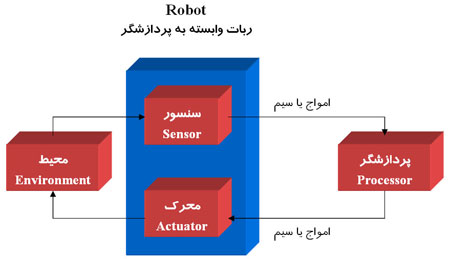
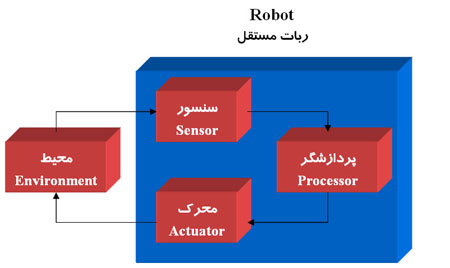
یکی از مهمترین مسئله در انتخاب زبان مربوطه، موضوع ثابت یا متحرک بودن روبات می باشد. همانطور که در قسمت قبل نیز اشاره شد در مسابقات ربوکاپ، روبات ها متحرک هستند و بوسیله امواج ، اطلاعات مورد نیاز را از مرکز کنترل دریافت می کنند. از آنجا که همیشه امکان ارسال ودریافت اطلاعات به و از مرکز کنترل امکان پذیر یا مقرون به صرفه نیست، بسیاری از برنامه نویسان و فعالان عرصه روباتیک از متد Embed کردن برنامه به روبات بهره می گیرند (چسباندن یا پیوند دادن به جزء اصلی). در این شیوه برنامه را با استفاده از زبان مربوطه نوشته وپس از انتقال آن به آی سیِ قابل برنامه نویسی، آن را به ربات منتقل می کنید. در صورتیکه خوانندگان به این موضوع علاقمند باشند می توان مقالاتی را در این زمینه که حاصل تجربیات عملی و شخصی اینجانب و بسیاری از دوستان صاحبنظر داخلی و خارجی است در شماره های بعدی در اختیار شما عزیزان قرار داد. تنها به عنوان مثال می توان به IC های قابل برنامه نویسی خانواده 8051 محصول شرکت ATMEL اشاره نمود. این آی سی را می توان با زبان اسمبلی یا C ویژه خود برنامه نویسی کرد.
یکی از اعضای فعال این خانواده از IC ها، AT89C51 است.
AT: نمایانگر سازنده محصول (ATMEL).
8: میکروکنترلر هشت بیتی.
9: نمایانگر دارا بودن حافظه Flash برای برنامه نویسی.
C : تکنولوژی ساخت IC را نشان می دهد که از نوع CMOS است (نه TTL) . IC های CMOS در رایانه ها نیز استفاده می شوند که مصرف پایین تری نسبت به IC های TTL دارد.
51: شماره IC که قابلیت های زیر را دارا می باشد :
1ـ 4 KB حافظه Flash
2ـ 128 Bytes RAM
3ـ چهار پورت ورودی و خروجی هشت بیتی (32 پایه) برای ارسال و دریافت اطلاعات
4ـ چهل پایه
عموماً برنامه نویسی در این شرایط بدلیل محدودیت فضا و مشکل بودن برقراری ارتباط از راه دور است. اما یکی از مهمترین امتیازات استفاده از اینگونه IC ها، اعطای خود مختاری و استقلال (اگر چه برخی مواقع، نسبی) به ربات مربوطه می باشد. توجه به این نکته ضروری است که روبات های متحرک نیز برای ارسال و دریافت اطلاعات بصورت مطلوب نیاز به استفاده از این نوع IC ها دارند ولی در این مدل طراحی، IC ها تنها وظیفه انتقال فرمان ها را بعهده می گیرند و کار تحلیل را بعهده مرکز کنترل می گذارند. همانطور که در مقاله قبل نیز اشاره شد، مرکز کنترل می تواند کامپیوتری باشد که شرایط موجود را از سنسورهای نصب شده بر روی روبات ها دریافت کرده و فرمانه ای لازم را به روبات ها ابلاغ نماید.
::
::
رابط های مورد نیاز
یکی از اساسی ترین موضوعاتی که علاقمندان به دانش رباتیک باید در نظر داشته باشند این است که استفاده از رابطهای مناسب میتواند تأثیر شایانی در بهبود عملکرد فنی کار داشته باشد. رابطهای مورد نیاز عبارتند از :
• رابط کاربر به برنامه نوشته شده برای مدیریت ربات مرکزی (برنامه نوشته شده تحت MS Windows یا Linux ) • رابط مرکز کنترل به ربات های تحت امر (امواج یا سیم ) • رابط برنامه نوشته شده به ربات (آی سی)
کتاب های متعددی در زمینه رابط های کامپیوتری وجود دارد. از مهمترین موضوعات موجود، استفاده از کامپیوتر برای ارسال اطلاعات به Port ها واسلات ها ( Slots ) است.
امتیاز: 0.00
وزارت آموزش و پرورش > سازمان پژوهش و برنامهريزی آموزشی
شبکه ملی مدارس ایران رشد
 ::
::
شما باید یک عنوان و متن وارد کنید!